This is an experiment to use Sourceforge's autopilot project's IMU to balance a ground based robot. Currently, the system cannot balance the robot completely, but gives it a nice try anyway. It needs some improvements for a fully balancing robot. Maybe it needs better locomotion, maybe proper PID, maybe a more accurate IMU, or maybe I can add some ultrosonics to the robot, so it can measure distance to ground aft and front, to improve on the IMU estimate.
Coming soon: some MPEGII video's that, hopefully, will show a balancing robot.
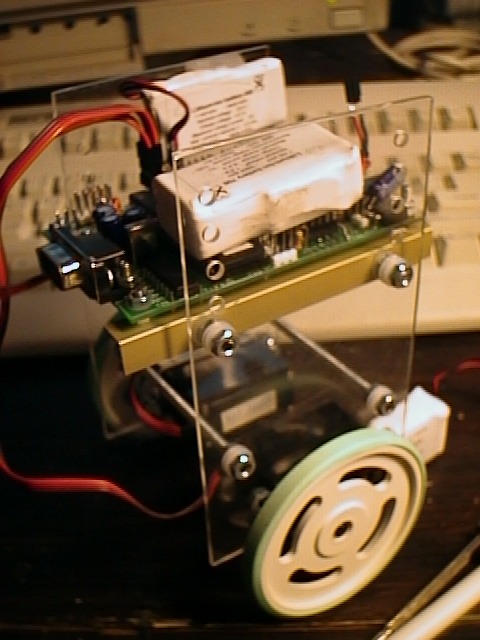
Specifications: rev2.2 autopilot, MPI MX-400 servos, li-ion 3.6V for servo, li-ion 7.2V for logic, plexiglass body panels, metal chasis, width: 116 mm, height: 154 mm, length: 108mm.
See the other robotics projects of Bram.